Achtung! Diese Seite enthält MathML. Bitte mit Firefox oder anderem MathML-kompatiblen Browser aufrufen. Sonst falsche Darstellung der Formeln.
Einleitung
In diesem Artikel soll gezeigt werden, wie man den Zahlenbereich der reellen Zahlen auf möglichst einfache Weise zu den komplexen Zahlen und dann weiter zu den Quaternionen
und von dort weiter zu den Oktonionen erweitern kann. Das soll mit einer minimalen Anzahl an Definitionen geschehen, aus denen dann möglichst viel geschlussfolgert wird. Es geht hier also um das
Verständnis des Aufbaus von ℂ, ℍ und O aus ℝ, um zu sehen, wie sich die neuen Zahlenbereiche natürlich aus den reellen Zahlen entwickeln lassen,
und ihnen die Erscheinung als abgehobenes, willkürliches, nichtreales Konstrukt zu nehmen.
Der Artikel erhebt keinen Anspruch auf Vollständigkeit und absolute mathematische Korrektheit.
1. 1. Erweiterung des Körpers der reellen Zahlen
Ausgehend von den reellen Zahlen wollen wir unseren Zahlenbereich erweitern. Dies geschieht, indem wir eine Variable einführen.
Wir nennen sie 𝐢.
Auch wenn wir nicht wissen, was 𝐢 ist, können wir mit 𝐢 rechnen:
Praktisch die Vektoreigenschaften von 𝐢 als Variable. Doch was ist
Die Antwort auf diese Frage lässt sich weder aus den Rechengesetzen für unsere Zahlen, noch aus den Rechengesetzen für Variablen ableiten.
Deshalb haben wir die Möglichkeit selbst festzulegen, was 𝐢 ⋅ 𝐢 sein soll. Soll nun folgendes erfüllt sein:
Wie wir wissen, gibt es keine Zahl aus unserem Zahlenbereich der reellen Zahlen, deren Quadrat -1 ist.
Denn aus x >= 0 folgt x*x >= 0 (2. Ordnungsaxiom) und aus x < 0 folgt -x * -x = x*x >= 0
Somit wissen wir, dass wir 𝐢 nicht durch eine reelle Zahl ersetzen können.
Ganz nebenbei haben wir mit 𝐢 eine Lösung für die Gleichung x² = -1 geschaffen.
Unsere eben gemachte Quadratdefinition hat eine Vielzahl von Konsequenzen.
Da gilt i² = -1 <= 0 kann der unser mit i erweiterter Körper nicht mehr wie R angeordnet sein. Durch die auf R bestehende vollständige totale Ordnung könnte man sonst i zwischen 2 reellen Zahlen immer weiter eingrenzen bis auf eine Zahl r mit r = i
Desweiteren gilt z.B.
Damit wir nicht so kompliziert rechnen müssen, nehmen wir das Assoziativgesetz für Multiplikationen unter 𝐢's als erfüllt an. Der Beweis dafür sei dem Hobby-Mathematiker überlassen.
Also:
𝐢⋅𝐢⋅𝐢⋅𝐢⋅𝐢 = (𝐢⋅𝐢)(𝐢⋅𝐢)⋅𝐢 = (-1)⋅(-1)⋅𝐢 = 1⋅𝐢 = 𝐢
Höhere Potenzen von 𝐢 können also durch Anwendung unserer Quadratdefinition abgebaut werden.
Also ist auch -𝐢 eine Lösung von x² = -1. (Dass 𝐢² = (-𝐢)² lässt sich allein schon aus den Rechenregeln für Variablen schließen,
d.h. ohne auf die Quadratdefinition angewiesen sein zu müssen).
Für die Wurzel von -1 definiert man nun:
Die bei der Definition von
weggefallene 2. Lösung von x² = -1 lässt sich nun einfach als schreiben.
Da nun das Quadrat von 𝐢 bekannt ist, können wir auch den Kehrwert von 𝐢 ermitteln.
Mit unserer Quadratdefinition finden wir:
𝐢⋅𝐢 = -1 => -(𝐢⋅𝐢) = 1 => -𝐢⋅𝐢 = 1
Damit haben wir unseren Kehrwert von 𝐢 gefunden und können nun auch negative Potenzen und Brüche mit 𝐢 ausrechnen.
Das Ergebnis ist also wieder eine komplexe Zahl c = e + f𝐢 mit e = ac - bd und f = ad + bc. Alle weiteren Gesetze lassen sich bei den Gesetzen für die komplexen Zahlen finden.
Nachdem wir nun unseren erweiterten Zahlenbereich haben, und mit 𝐢 ganz gut rechnen können, könnte man jetzt trotzdem noch fragen, was 𝐢 ist. Das würde aber nur heißen, dass man
𝐢 nicht akzeptiert. Genauso gut könnte man ja auch fragen: Was ist 1? 1 lässt sich nicht lösen, sondern nur durch kompliziertere Ausdrücke ersetzen. Es ist also reine
Ermessenssache ob man 1 als ungelöstes Problem sieht oder diese Zahl als solche akzeptiert und damit rechnet. So kann man es auch mit 𝐢 machen. Man braucht die Frage
was 𝐢 denn nun wirklich sei nicht beantworten, sondern kann mit 𝐢 nach den gefundenen Regeln rechnen und den Zahlenbereich der komplexen Zahlen zur Beschreibung
direkt messbarer Größen verwenden. z.B. die komplexe Wechselstromrechnung. (komplex ist hier wirklich als komplex, also nicht reell und nicht im Sinne von "kompliziert" gemeint).
Einheitskomplexe Zahlen
Wie wir gesehen haben lassen sich die komplexen Zahlen nicht total ordnen. Aber sie lassen sich normieren. |a + bi| := sqrt (a² + b²). Eine besondere Bedeutung kommt den komplexen Zahlen zu, deren Norm 1 ist.
Das ist der Unterraum der Einheitskomplexen Zahlen. Mit ihnen lassen sich Drehungen im R2 darstellen. Man kann sie deshalb auch Drehkomplexe Zahlen nennen.
Drehkomplexe Zahlen
-a -bi: Multiplikation mit -1, Drehung um 180°, Punktspiegelung bzw. Inversion des Drehvektors, Quotient ist -1 (Drehungen subtrahieren sich zu +-180°)
a -bi: inverses Element, gleiche Drehung in die entgegengesetzte Orientierung, Drehungen addieren sich zu Null
-a +bi: Drehungen addieren sich zu +-180° Produkt ist -1
2. 2. Erweiterung des Zahlenbereichs
Unseren nun gewonnenen Zahlenbereich der komplexen Zahlen ℂ wollen wir jetzt nochmal erweitern. Dazu führen wir wieder eine neue Variable ein. Sie soll 𝐣 heißen.
Die Einführung von 𝐣 verläuft ähnlich wie die Einführung von 𝐢. Es soll gelten:
𝐣 nennen wir quaternionische Einheit. Mit dem nun aufgebauten Zahlenbereich haben wir also nicht nur eine, sondern 2 nichtreelle Einheiten.
Also sozusagen die komplexen Zahlen mit doppelten Imaginärteil.
Da sich 𝐣 genauso verhält wie 𝐢, können die Gesetze für die komplexen Zahlen genauso wie auf a + b𝐢 auch auf a + b𝐣 angewendet werden.
Da wir nun 2 nichtreelle Einheiten haben, können wir auch deren Produkt bilden:
i*j = ij
Dieses Produkt kann nicht weiter vereinfacht werden. Deshalb müssen wir es als unsere 3. nichtreelle Einheit akzeptieren. Von der imaginären und quaternionischen Einheit wissen wir, dass deren Quadrat -1 ist. Wie sieht es nun mit dem
Quadrat unserer 3. nichtreellen Einheit aus?
Im Gegensatz zu den beiden anderen nichtreellen Einheiten ist das Quadrat unserer 3. nichtreellen Einheit 1 statt -1. Das ist ein Bruch der Symmetrie. Eigentlich sollten alle nichtreellen Einheiten quadriert -1 ergeben.
Das ist aber nicht unser einziges Problem.
Was passiert, wenn man die 3. binomische Formel auf i und j anwendet?
Somit gilt: i + j = 0 oder i - j = 0. Also j = i oder j = -i. Wie wir sehen ist nach den Rechengesetzen j ein Vielfaches von i und keine unabhängige Variable.
Unsere bisherigen Rechengesetze sind zu restriktiv und lassen die Einführung einer weiteren unabhängigen Variable nicht zu.
Die Rechengesetze müssen also gelockert bzw. zu einem Teil aufgegeben werden um j als unabhängige Variable existieren lassen zu können.
Um aus diesem Dilemma herauszukommen haben wir 2 Möglichkeiten. 1. Wir lassen Nullteiler zu. Damit wäre dann einer der beiden Faktoren nicht notwendigerweise 0 und i von j unabhängig. oder 2. Die Kommutativität der Multiplikation wird aufgegeben.
Dann ist das Ergebnis der 3. binomischen Formel mit i und j nicht Null.
Letztendlich stellt sich heraus, dass das Zulassen von Nullteilern ein gravierenderer Einschnitt ist und mehr von unseren gewohnten Rechengesetzen ändern würde als das Aufgeben der Kommutativität der Multiplikation. Also wählen wir den 2. Weg und Ersetzen die Kommutativität der Multiplikation
durch die Antikommutativität. Allerdings nur für das Produkt der imaginären und der quaternionischen Einheit. Alle anderen Produkte bleiben unverändert und deren Kommutativität gilt weiterhin.
Somit gilt nun ein neues Gesetz für das Produkt von i und j:
Wir wollen nun sehen ob diese eine Regel alle unsere Probleme im quaternionischen Zahlenbereich löst. Bilden wir nun das Quadrat unserer gemischten Einheit:
Wie wir sehen ist die Symmetrie wiederhergestellt. Wir haben nun 3 gleichberechtigte nichtreelle Einheiten deren Quadrat -1 ist. Somit haben wir auch einen 3. Unterraum für die komplexen Zahlen nämlich mit a + b(ij)
Durch unser neues Antikommutativgesetz lässt sich die 3. binomische Formel nicht mehr zum Nachweis einer Abhängigkeit von i und j nutzen.
Somit lassen sich alle Rechenausdrücke zu folgender Form vereinfachen:
h= a + bi + cj + dij
h wird auch Quaternion genannt. Also ein vierteiliger Ausdruck. Jetzt kann man natürlich fragen, was das Produkt 𝐢𝐣 denn nun wirklich sei.
Das wäre im Prinzip die gleiche Diskussion wie schon bei 𝐢.
Da sich 𝐢𝐣 mit mit unseren Regeln nicht weiter vereinfachen bzw. "auflösen" lässt, ist es sinnvoll es als neues Element zu akzeptieren.
Zur Vereinfachung kann man einen zusätzlichen Namen für 𝐢𝐣 wählen:
𝐢𝐣 =: k
Also
h = a + bi + cj + dk
Die neue Bezeichnung erschwert aber das Rechnen, weil sie die Zusammengesetztheit von k verbirgt und das Assoziativgesetz in zusammengesetzten Ausdrücken dann nicht mehr direkt angewendet werden kann. Deshalb werde ich k nur in Ausnahmefällen benutzen.
Wie wir vorhin gesehen haben gilt: 𝐢𝐣⋅𝐢𝐣 = (𝐢𝐣)² = k² = -1.
Also verhält sich die gemischte Einheit 𝐢𝐣 (oder k) genauso wie die imaginäre Einheit 𝐢 und die quaternionische Einheit 𝐣.
Die Gesetze für die komplexen Zahlen lassen sich demzufolge auch auf a + b𝐢𝐣 anwenden.
Also sind alle 3 nichtreellen Einheiten (𝐢, 𝐣, 𝐢𝐣) untereinander gleichwertig und symmetrisch.
Unter diesem Umstand ist die Bezeichnung von k vorteilhaft, die gleichwertige Symmetrie von i, j und k zum Ausdruck zu bringen.
Nun noch die Multiplikationstabelle für die Quaternionen:
Die Reihenfolge der Multiplikation ist Spalte mal Zeile.
Alle weiteren Gesetze lassen sie bei den Gesetzen für Quaternionen finden. Anders als die komplexen Zahlen schaffen die Quaternionen keine Lösungen für vorher unlösbare Fälle.
Sie erhöhen lediglich die Vielfachheit schon vorhandener Lösungen. z.B. hat x² = -1 nun unendlich viele Lösungen:
(𝐢, -𝐢, 𝐣, -𝐣, 𝐢𝐣, -𝐢𝐣) oder (i/V2 + j/V2) oder:
(a*cos phi + b*sin phi)² = -1. a,b € {i, j, ij} a ≠ b
Der vollständige Lösungsraum für q² = -1 ist:
q= (a𝐢 + b𝐣 + c𝐢𝐣) mit a² + b² + c² = 1;
Quaternionen können zur Speicherung von Drehungen im R3 verwendet werden. Das Format sieht folgendermaßen aus: Die Drehung wird in Drehwinkel und Drehachse zerlegt. Der Drehwinkel wird im Realteil des Quaternions
gespeichert, die Achse in den 3 nichtreellen Einheiten. Der Richtungsvektor (x,y,z) der Drehachse wird also in (i, j, k) gespeichert. Ein Drehquaternion hat immer die Länge 1. Somit variiert auch die Länge
des Richtungsvektors der Drehachse. Geht der Drehwinkel gegen 0, dann geht der Realteil gegen 1 und der Richtungsvektor gegen (0, 0, 0). Das Drequaternion (1,0,0,0) ist eine Drehung um 0°. Der Richtungsvektor
ist jetzt der Nullvektor und liefert keine Aussage mehr über die Drehachse. Aber das braucht er auch nicht mehr, weil die Drehachse bei einer 0° Drehung keine Rolle mehr spielt.
Eine 180° Drehunge wird durch das Quaternion (0, x,y,z) dargestellt. Der Richtungsvektor der Drehachse hat nun maximale Länge. Wird der Winkel noch größer, strebt der Realteil gegen -1 und der Richtungsvektor gegen
(0,0,0). Eine 360° Drehung wird durch das Quaternion (-1,0,0,0) dargestellt. Wieder ist der Richtungsvektor der Nullvektor und liefert keine Aussage über die Drehachse. Aber das ist auch nicht nötig, denn egal
welche Achse man bei der 360° Drehung verwendet, es kommt immer die gleiche Endlage des Körpers raus (Nämlich die Ausgangslage).
Somit wird jede Drehung ausnahmslos durch genau 2 Quaternionen dargestellt. Nämlich durch q und -q. Der Winkel im Quaternion hat den Bereich von 0° bis 360°. Es wird immer in dieselbe Orientierung gedreht.
Möchte man in die entgegengesetzte Orientierung drehen, invertiert man den Richtungsvektor.
Verwendet man Quaternionen um Drehgruppen von Körpern zu erstellen, enthalten diese Gruppen doppelt so viele Elemente wie bei der Darstellung mit Matrizen. Das kommt daher, da Drehmatrizen eindeutig sind,
da sie nur die Endlage der Drehung speichern. Um die gleichen Drehgruppen wie bei den Matrizen zu bekommen, muss man die Faktorgruppe der Quaternionendrehgruppe bezüglich {1,-1} bilden.
Die unfaktorisierten Gruppen sind die binären Gruppen. So gibt es z.B. eine binäre Ikosadergruppe. Diese enthält 120 Elemente.
Definition binäre Gruppe:
Eine binäre Gruppe ist eine Gruppe, welche genau ein Element der Ordnung 2 enthält. Das sogenannte binärneutrale Element.
Jedes Element der Gruppe hat eine binärinverses Element. Werden das Element und sein binärinverses Element verknüpft kommt das binärneutrale Element heraus.
Vereinfacht kann man sagen, dass eine binäre Gruppe noch ein 2. Element hat, was sich ähnlich verhält wie das neutrale Element der Gruppe.
Während das neutrale Element alle Elemente der Gruppe auf sich selbst abbildet, bildet das binärneutrale Element jedes Element auf sein binärinverses Element ab.
Die Rechts- und Linkseindeutigkeit, wie sie beim neutralen und inversem Element gegeben ist, ist auch beim binärneutralem und binärinversem Element gegeben.
Neutrales Element und binärneutrales Element sind zueinander binärinverse Elemente.
Bei den Drehquaternionen ist 1 das neutrale Element und -1 das binär neutrale Element.
-1*1 = -1 da das neutrale Element das binärinverse Element auf sich selbst abbildet.
1*-1 = -1 da das binärneutrale Element das neutrale Element auf sein binärinverses Element abbildet.
Neutrales und binärneutrales Element sind verschieden und können nebeneinander koexistieren.
Im Gegensatz zu den Drehmatrizen, wo eine Inversion (Multiplikation mit -1) der Drehmatrix zu einer Drehspiegelmatrix führt, bleibt die Inversion bei Quaternionen wirkungslos. Somit können Quaternionen keine Drehspiegelungen und
damit auch keine Spiegelungen abbilden. Bei Matrizen ist eine Ebenenspiegelung eine Drehspiegelung um 180° (Drehung um 180° um den Normalenvektor der Spiegelebene + Inversion (Punktspiegelung am Schnittpunkt von Drehachse und Spiegelebene).
Drehquaternionen
-r -ai -bj -cij: Multiplikation mit -1, Drehung mit gleicher Endlage nur mit der anderen Orientierung: Quotient ist -1 (binär neutrales Element) Drehungen subtrahieren sich zu 360°
r -ai -bj -cij: inverses Element, Drehachse wird invertiert, gleiche Drehung in die andere Orientierung, Produkt ist 1 (Drehungen addieren sich zu 0°)
-r +ai +bj +cij: binär inverses Element, Drehungen addieren sich zu 360°: Produkt ist -1 (binär neutrales Element)
Drehmatrix: -M = M*(-id) Punktspiegelung am Ursprung, abhängig von Dimension: n gerade: Drehung, n ungerade: Punktspiegelung (Inversion)
3. 3. Erweiterung des Zahlenbereichs
Wie wir gesehen haben, sind die Quaternionen nützlich um Drehungen darstellen zu können. Aber auch die Quaternionen lassen sich noch erweitern. Um das zu tun definieren wir folgendes:
Es gibt eine oktonionische Einheit 𝐨 mit
𝐨² = -1
Diese oktonionische Einheit fügen wir unserem Zahlenbereich der Quaternionen hinzu. Schauen wir ob das funktioniert oder ob wir noch zusätzliche Änderungen machen müssen:
Mit unserer neuen oktonionischen Einheit entstehen weitere gemischte Produkte:
𝐢𝐨, 𝐣𝐨, 𝐢𝐣𝐨
für diese Produkte gilt ebenfalls unser bei den Quaternionen eingeführtes Antikommutativgesetz. Somit gilt:
Wir erhalten einen Widerspruch. Wie schon bei der Hinzufügung der qaternionischen Einheit 𝐣 sind bei der Hinzufügung der oktonionischen Einheit 𝐨 Probleme aufgetreten. Bei unserem Rechenbeispiel haben wir mehrmals das Assoziativgesetz für die Multiplikation
angewendet. Das lässt vermuten, dass es damit ein Problem gibt. Und so ist es auch. Damit es beim Hinzufügen der oktonionischen Einheit 𝐨 keine Widersprüche gibt, muss dass Assoziativgesetz in einem Fall durch das Antiassoziativgesetz ersetzt werden:
Somit ist die Multiplikation bei den Oktonionen nicht mehr grundsätzlich assoziativ. Es muss also die Assoziation beachtet werden. Bei 3 verschiedenen Faktoren muss das Antiassoziativgesetz angewendet werden.
Sind 2 oder mehr Faktoren gleich, ist die Assoziativität wieder erfüllt und es gelten folgende Gesetze:
Um Unsicherheiten beim Rechnen mit Oktonionen zu beseitigen folgt hier die Ausrechnung der nicht offen sichtbaren elementaren Produkte aus imagninärer, quaternionischer und oktonionischer Einheit. Wegen dem Antiassoziativgesetz muss die Assoziierung bei der Multiplikation
beachtet werden. Da Klammern unübersichtlich sind, wird hier die Assoziierung durch unterschiedliche Multiplikationszeichen festgelegt. Am stärksten assoziiert die zeichenlose Multiplikation, dann die Punktmultiplikation, dann die Zweipunktmultiplikation usw.
Als Übung sei empfohlen die beiden Faktoren der am schwächsten assoziativen Multiplikation des Ausgangsterms zu vertauschen und am Ende der Umformung zu überprüfen ob sich das Endergebnis ins Negative transformiert.
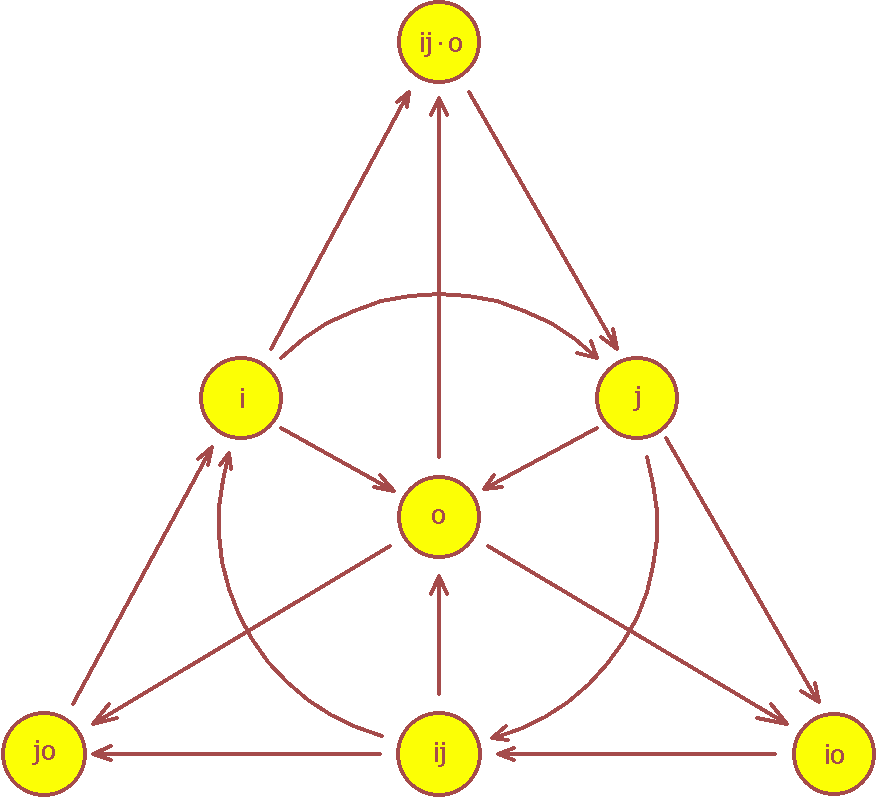
Als sehr hilfreich für die Multiplikation der nichtreellen Einheiten erweist sich die Benutzung des Fanodiagramms.
Das Fanodiagramm besteht aus 7 Zyklen mit jeweils 3 Faktoren. Die 7 Zyklen werden durch die 7 Geraden des Fanodiagramms symbolisiert. Die 3 Faktoren sind durch die Inhalte der 3 Kreise einer Geraden dargestellt. Der kreisförmige Zyklus ist die einzige Gerade
im Diagramm, die gekrümmt und geschlossen ist. Die anderen Geraden sind auch zyklisch, aber der Zyklus ist bei ihnen aus Übersichtlichkeitsgründen unterbrochen. Deshalb muss Die Verbindung vom letzten Punkt der Geraden zum 1. Punkt der Geraden gedanklich
hergestellt werden.
Bei Multiplikation gegen die Pfeilrichtung bekommt das Ergebnis ein Minuszeichen.
Die 7 Zyklen stellen 7 einander völlig gleichwertige Quaternionenunteräume des Oktonionenraums dar. Ebenso wie der Quaternionenraum 3 einander gleichwertige komplexe-Zahlen-Unterräume beherbergt.
Die Unterraumsymmetrie ist eine wichtige Eigenschaft, die alle Zahlenbereichserweiterungen betrifft. Nur wenn sie erhalten bleibt, funktioniert die Zahlenbereichserweiterung.
Mit unseren gewonnenen Rechenregeln können alle oktonionischen Ausdrücke auf folgende Form gebracht werden:
O = a + b𝐢 + c𝐣 + d𝐢𝐣 + e𝐨 + f𝐢𝐨 + g𝐣𝐨 + h𝐢𝐣⋅𝐨
Wobei a bis h Zahlen aus ℝ sind. Um die Schreibweise zu vereinfachen definieren wir:
Somit lässt sich unser Oktonion etwas einfacher schreiben als:
O = a + b𝐢 + c𝐣 + d𝐢𝐣 + e𝐨 + f𝐢𝐨 + g𝐣𝐨 + h𝐢𝐣𝐨
Die Produkte der Einzelterme lassen sich zu nun zu folgender Multiplikationstabelle aufschreiben (Spalte mal Zeile).
Nummeriert man die Einzelterme von 0 bis 7, erhält man eine weitere Tabelle. Diese bildet ein magisches Quadrat. Also die Zeilen- und Spaltensumme (Vorzeichen nicht beachten) jeder Zeile bzw. Spalte ist gleich (28). Was bedeutet, dass in jeder Zeile und Spalte alle
8 Einheitsvektoren vorkommen.
Die farbige Unterlegung der Tabelle zeigt, welche Regel angewendet werden muss, um das Produkt auszurechnen.
Blau: die Quadratdefinition wird benötigt
Grün: das Antikommutativgesetz muss angewendet werden
Rot: das Antiassoziativgesetz muss angewendet werden.
Die grau unterlegten Felder dienen nur als Hilfe, um die Antisymmetrie der Tabelle zu überprüfen.
Somit ergibt sich eine weitere Schreibweise für ein Oktonion:
O = a𝐞0 + b𝐞1 + c𝐞2 + d𝐞3 + e𝐞4 + f𝐞5 + g𝐞6 + h𝐞7
Die letzte Darstellung hat Vorteile bei der Verarbeitung von Oktonionen im Computer. Etwa bei der Programmierung des Multiplikationsalgorithmusses zweier allgemeiner Oktonionen.
Auch bei den Oktonionen kann man eine Norm definieren: